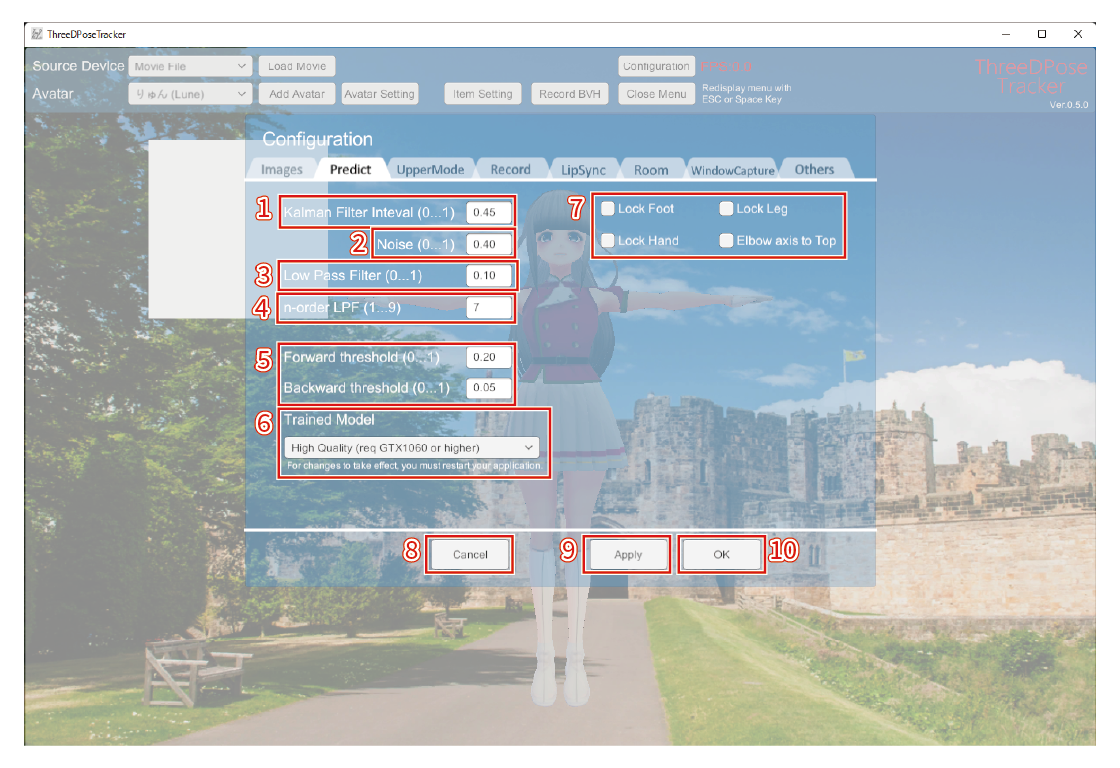
1,Kalman Filter Interval
Kalman フィルターの間隔を入力します。
補足:大きな値にすると機敏に動きますが、ガタつきが大きくなります。小さくすると滑らかな動きになりますが、ゆっくりと動きも小さな動きになっていきます。
2,Kalman Filter Noise
Kalman フィルターのノイズを入力します。
補足:1と同じです。
3,Low Pass Filter
Low Pass Filter の値を入力します。
補足:飛びやブルブルを抑える為のフィルターです。Height Quality モデルであれば 0 ~ 0.2 程度が妥当です。大きくするとなめらかになりますが、遅延と動きが放漫になってきます。細かい動きが不要であれば 0.3 くらいでもなんとかなります。数値を変更しても処理速度には影響しません。
4,n-order LPF
上記 Low Pass Filter を何回かけるかを入力します。
補足:大きくすると効果は強くなりますが、数字に比例して効果が上がる訳ではありません。対して重い処理でもないので初めから最大の 9 でも良いくらいです。
5,threshold
しきい値を入力します。
補足:AI からの出力は 0 ~ 1 のスコアで出力されます。1 が自信ありで 0 が自信なしです。人が画像に映っている場合は通常 0.5 以上のスコアになります。人が映っていないときは 0 ~ 0.2 程度です。この設定は人が映っていないと判断する閾値で、スコアがこの閾値以下になるとモーションが止まります。Forward はアバターが正面を向いている時(体の向きが正面に対して ±45 度の範囲)の閾値です。
6,Trained Model
学習モデルを選択します。
補足:Low Quality モデルは残念ながら姿勢推定の精度はものすごく悪いですが高速に動作します。グラフィックカードのない PC でもそれなりに動作します。ですがある程度新しい CPU じゃないと動かないかも知れません(i5-7500のグラフィックカード無しで 12fps 程度でした。i3 やこれ以下だと動かすのは難しいかも知れません)。あくまでどんな感じかなと雰囲気がわかる程度と考えてください。実際、後ろ向きや背景にいろいろあるとまともに認識しません。
7,各部位の固定や軸変更
足首の固定、脚の固定、手首の固定、肘の回転軸の変更です。
補足:それぞれ入力映像で足先や手先が写りにくい場合など、モーションキャプチャー結果が暴れてしまう時に試してみてください。
8,Cancel
1~ 7 の入力値をリセットしてウィンドウを閉じます。
9,Apply
1~ 7 の入力値を反映します。
10,OK
1~ 7 の入力値を反映してウィンドウを閉じます。
TDPT(Windows版) 操作説明
- P01 トップ画面
- P02 Add Avatar ウィンドウ
- P03 Avatar Setting ウィンドウ
- P04 Item Setting ウィンドウ
- P05 Configuration ウィンドウ Images タブ
- P06 Configuration ウィンドウ Predict タブ
- P07 Configuration ウィンドウ UpperMode タブ
- P08 Configuration ウィンドウ Record タブ
- P09 Configuration ウィンドウ LipSync タブ
- P10 Configuration ウィンドウ Room タブ
- P11 Configuration ウィンドウ WindowCapture タブ
- P12 Configuration ウィンドウ Others タブ